

北京大学先进制造与机器人学院王启宁教授课题组在穿戴式机器人领域取得重要进展,创新水下外骨骼机器人系统
近日,北京大学先进制造与机器人学院王启宁教授课题组在穿戴式机器人及人机耦合效能增强方面取得新进展,研制出首款便携式潜水辅助外骨骼机器人系统,通过提供膝关节助力,显著降低了潜水过程中的空气消耗与肌肉激活水平。该研究成果以“An Underwater Exoskeleton for Scuba Diving: Reducing Air Consumption and Muscle Activation Through Knee Assistance”为题,于2025年10月14日在线发表于机器人领域国际顶级期刊《IEEE Transactions on Robotics》(DOI: 10.1109/TRO.2025.3621405)。
海洋覆盖了地球表面的71%,是人类活动的重要空间。水肺潜水作为探索水下世界的主要方式,在海洋科研、资源勘探等领域发挥着关键作用。然而,与高效的陆地行走不同,人类在水下运动时需要克服水体阻力,能量消耗远高于陆地,严重限制了潜水员的续航能力和作业范围。近年来,新兴的下肢外骨骼技术已在陆地行走、跑步等场景中展现出降低人体代谢成本的巨大潜力。能否将外骨骼技术应用于水下环境,以提升人类的潜水效率?本研究针对这一挑战给出了肯定的答案。
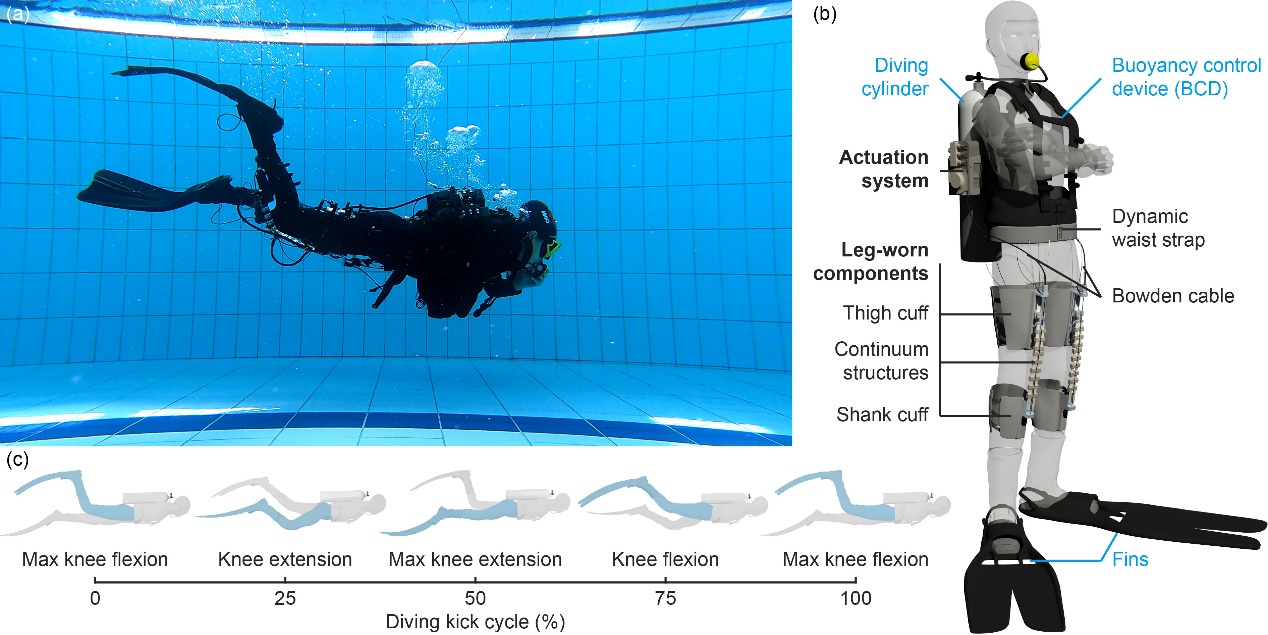
图1 水下外骨骼整体设计
要实现潜水辅助,需要克服多方面困难。首先,相比于陆地,水下运动的生物力学研究很少,其动作特征也与陆地存在根本差异,这为外骨骼的辅助原理与力矩曲线设计带来了挑战。其次,水下环境对外骨骼的防水、配重平衡、穿戴牢固性及控制有效性均提出了严峻挑战,而相关研究先例屈指可数、效果有限,难以提供有效参照。最后,对水下可穿戴机器人性能进行量化评估本身也存在相当难度。
针对以上问题,王启宁教授课题组提出并研制了一款双侧绳驱动膝关节水下外骨骼,其辅助力矩曲线启发自潜水员的股四头肌激活特征。利用大小腿处的惯性传感器实时估计运动相位,基于力测量的迭代位置控制策略能够精准施加力矩。在系统设计上,外骨骼采用绳驱动结构,使三分之二以上的重量集中于潜水员背部,可通过浮力背心有效补偿、避免水下失衡。腿部执行端的连续体结构能适应膝关节瞬心的变化,在传递助力的同时避免与膝盖碰撞。通过采用此前提出的动态腰带,课题组解决了水下大腿绑带容易下滑的问题,增强了穿戴稳定性。此外,研究综合运用了气体消耗、水下运动学、水下肌电与外骨骼输出力四类信号,以全面评估外骨骼的整体辅助效果。
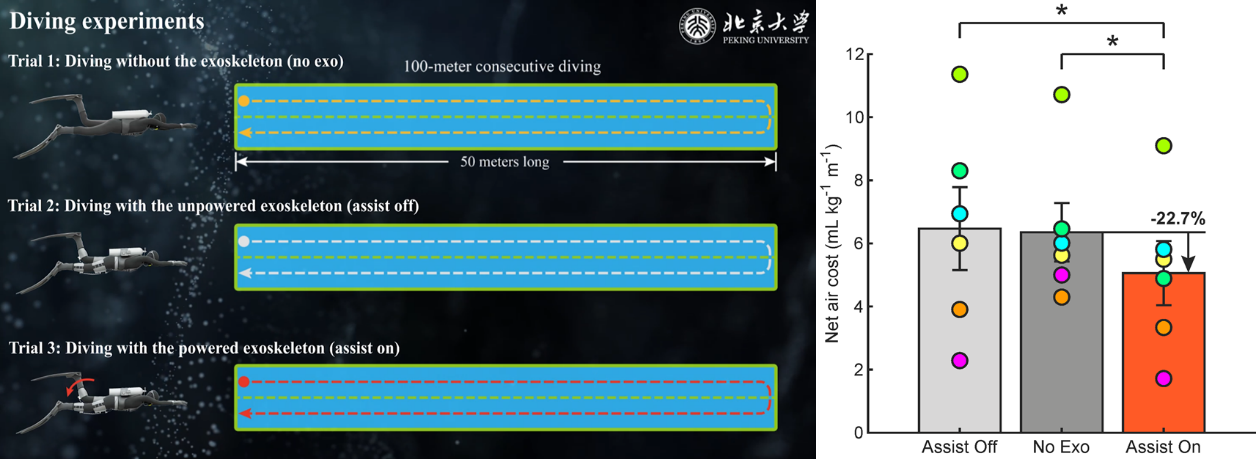
图2 不同条件下移动单位距离的净空气消耗
为验证外骨骼的有效性,研究团队组织了六名经验丰富的潜水员进行了实验测试。潜水员需分别在无外骨骼、穿戴外骨骼但无助力、穿戴外骨骼且有助力三种条件下完成100米水下游动。实验结果表明,与无外骨骼潜水相比,在外骨骼助力下,潜水员的净空气成本降低了22.7%,峰值股四头肌激活水平降低了20.9%。此外,腓肠肌的平均激活也显著降低了20.6%,这表明潜水员充分适应并利用了外骨骼辅助。相比于人类自然行走能力,潜水是一种后天学习的运动,这可能允许外骨骼更大程度地干预/矫正人体游动动作,而不产生能耗上的负面影响。
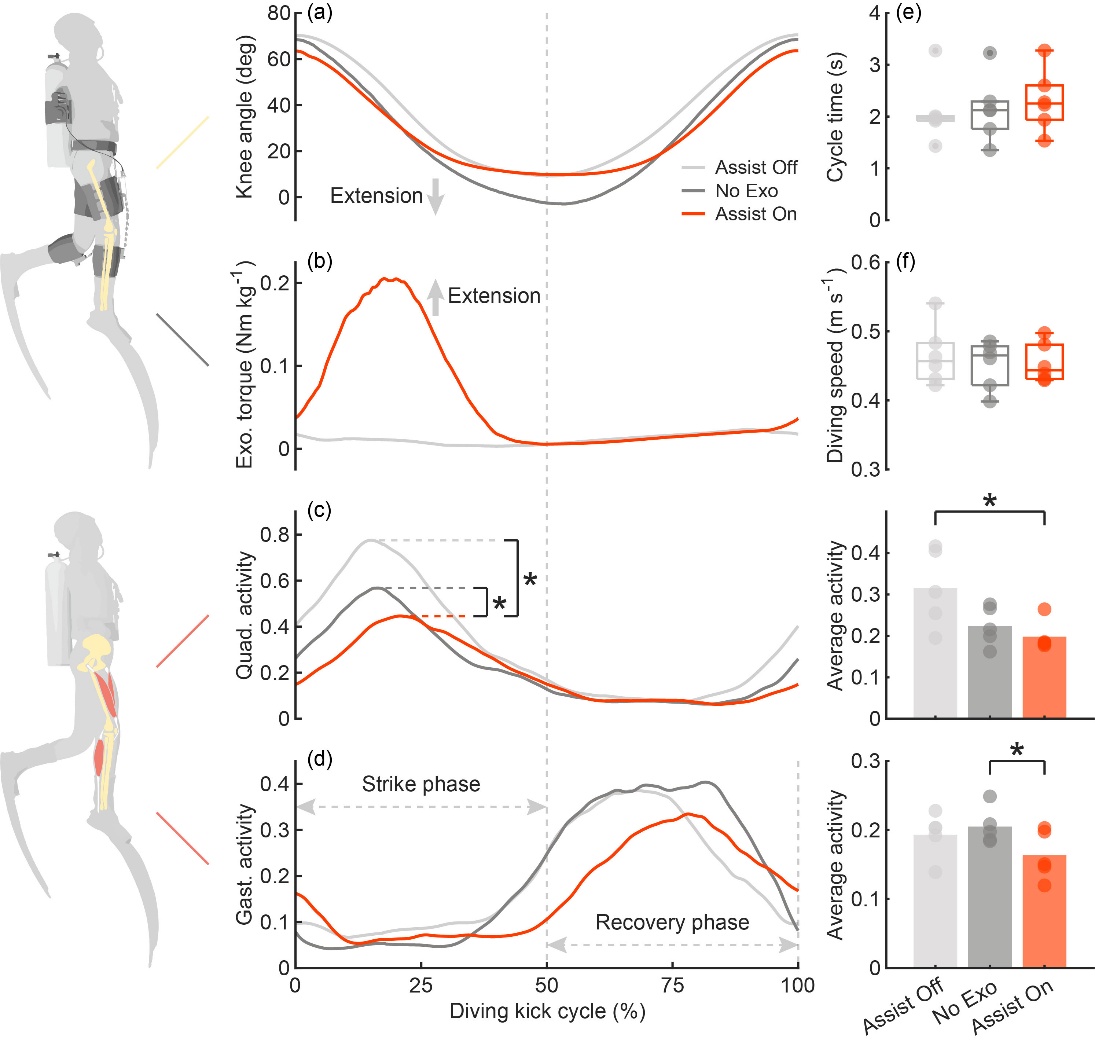
图3 主要的动力学、运动学和肌肉激活结果
王启宁教授课题组在国际上率先开展穿戴式水下游动助力机器人研究,近年来取得了一系列研究成果。本项研究为最新进展之一,成功地将外骨骼技术的应用边界从陆地扩展至实际水下环境,证明了动力外骨骼在特殊环境下增强人类能力的可行性。该水下外骨骼提供了一种全新的生物启发式推进方案,有望应用于延长水下作业时间、减轻潜水员疲劳以及辅助潜水训练等多个场景,为未来水下助游设备的设计与评估提供了重要参考。
该论文的第一作者为北京大学先进制造与机器人学院博士研究生吴显达、博士研究生徐明、北京大学人工智能研究院助理研究员周志浩。北京大学先进制造与机器人学院王启宁教授为唯一通讯作者。合作者包括原北京大学工学院硕士生娄文杰,北京大学先进制造与机器人学院工程师张腾、周亚雷,副研究员麦金耿。