






-
2026-07-18 北大-节卡通用智能机器人联合实验室成立暨机器人设备捐赠仪式圆满举行
-
2026-07-16 北京大学先进制造与机器人学院2026年全国优秀大学生暑期学科体验营成功举办
-
2026-07-13 北京大学李忠奎教授团队成果荣获第15届亚洲控制会议最佳论文奖
-
2026-07-09 先进制造与机器人学院2026届毕业生座谈会顺利举行
-
2026-07-09 先进制造与机器人学院举行机器人工程专业本科生培养对接座谈会
-
2026-07-03 先机在握·智造远方丨北京大学先进制造与机器人学院举行2026年毕业典礼暨学位授予仪式


-
 北京大学谢广明教授团队在IJRR发表最新成果:让机器鱼“听懂水流”,实现水下精准感知近日,北京大学先进制造与机器人学院谢广明教授团队在这一难题上取得重要突破。团队创造性地将鱼类常见的“间歇性游动”策略引入仿生机器鱼系统,使机器鱼不仅能“动”,更善于“感”。相关成果以“Real-time position and orientation estimation in dual self-propelled swimmers using artificial lateral line systems with intermittent swimming strategy”为题,发表于...2026.07.29
北京大学谢广明教授团队在IJRR发表最新成果:让机器鱼“听懂水流”,实现水下精准感知近日,北京大学先进制造与机器人学院谢广明教授团队在这一难题上取得重要突破。团队创造性地将鱼类常见的“间歇性游动”策略引入仿生机器鱼系统,使机器鱼不仅能“动”,更善于“感”。相关成果以“Real-time position and orientation estimation in dual self-propelled swimmers using artificial lateral line systems with intermittent swimming strategy”为题,发表于...2026.07.29 -
 北京大学张智琅研究员提出“原位—仿真—优化”多材料增材制造一体化研究方法北京大学先进制造与机器人学院张智琅研究员在国际综合类顶刊Advanced Science发表论文《Mixing-Driven Defects and Composition Evolution in Multi-Material Metal Additive Manufacturing》,提出了“原位—仿真—优化”的一体化研究框架,为理解与优化多材料金属增材制造过程提供了新方法基础。该工作也得到了合作单位苏黎世联邦理工学院(ETHZ)的报道。2026.06.04
北京大学张智琅研究员提出“原位—仿真—优化”多材料增材制造一体化研究方法北京大学先进制造与机器人学院张智琅研究员在国际综合类顶刊Advanced Science发表论文《Mixing-Driven Defects and Composition Evolution in Multi-Material Metal Additive Manufacturing》,提出了“原位—仿真—优化”的一体化研究框架,为理解与优化多材料金属增材制造过程提供了新方法基础。该工作也得到了合作单位苏黎世联邦理工学院(ETHZ)的报道。2026.06.04 -
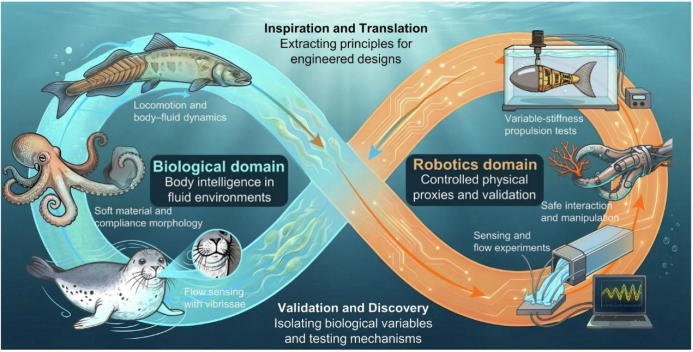 北京大学喻俊志教授团队综述论文发表于nature 合作期刊《npj robotics》近日,北京大学先进制造与制造机器人学院喻俊志课题组综述论文《Bioinspired underwater soft robots: from biology to robotics and back》在nature 合作期刊《npj robotics》上发表。2026.04.30
北京大学喻俊志教授团队综述论文发表于nature 合作期刊《npj robotics》近日,北京大学先进制造与制造机器人学院喻俊志课题组综述论文《Bioinspired underwater soft robots: from biology to robotics and back》在nature 合作期刊《npj robotics》上发表。2026.04.30 -
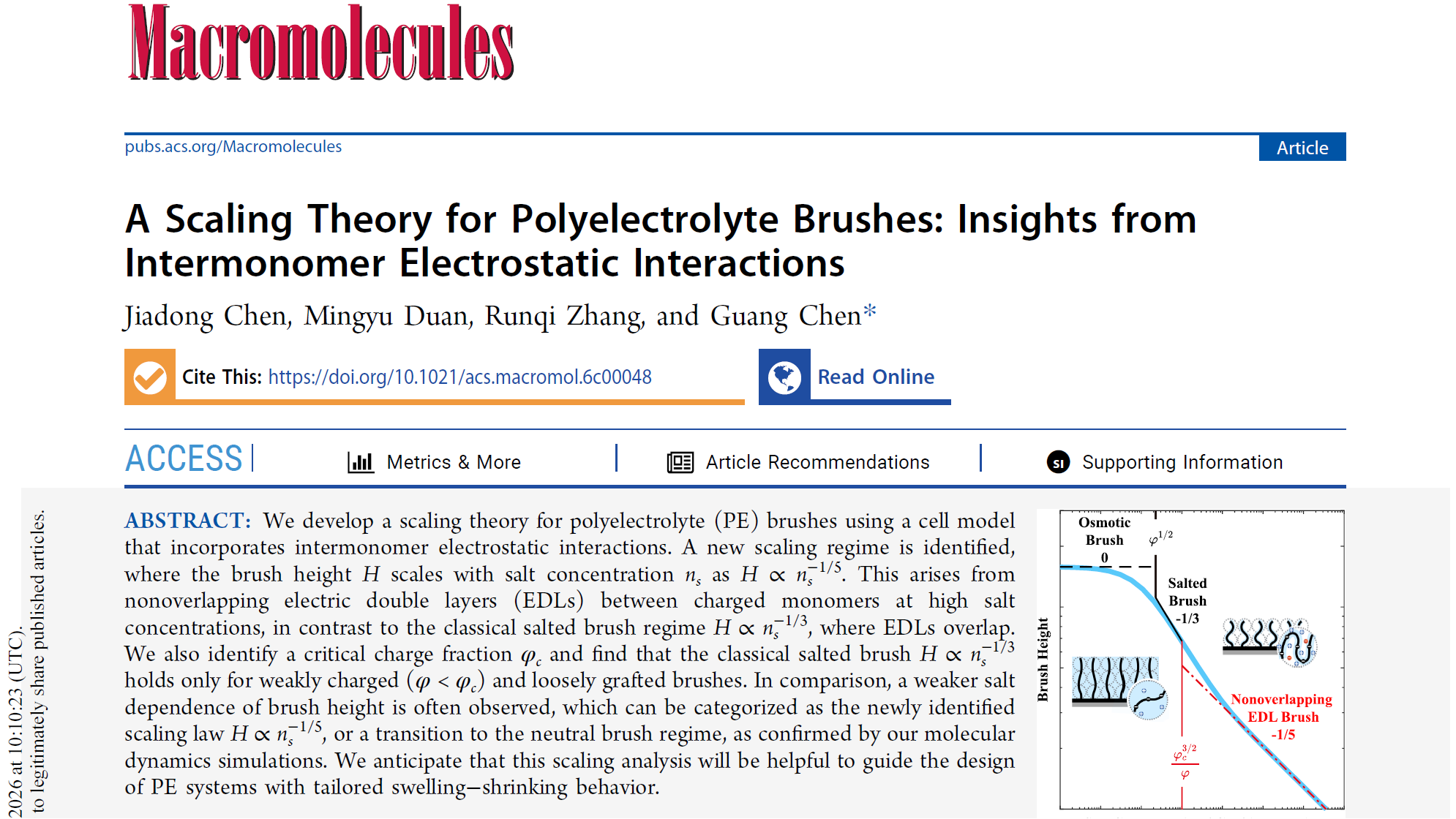 北京大学陈光课题组在《Macromolecules》发表研究论文,提出了一种基于单胞模型的聚电解质刷标度理论近日,北京大学先进制造与机器人学院陈光课题组在高分子领域权威期刊 Macromolecules 上发表研究论文,题为“A Scaling Theory for Polyelectrolyte Brushes: Insights from Intermonomer Electrostatic Interactions”。该研究提出了一种基于单胞模型的聚电解质刷标度理论,系统揭示了单体间静电相互作用对聚电解质刷构型及溶胀行为的关键影响,为界面软物质结构调控提供了新的理论框架。2026.04.29
北京大学陈光课题组在《Macromolecules》发表研究论文,提出了一种基于单胞模型的聚电解质刷标度理论近日,北京大学先进制造与机器人学院陈光课题组在高分子领域权威期刊 Macromolecules 上发表研究论文,题为“A Scaling Theory for Polyelectrolyte Brushes: Insights from Intermonomer Electrostatic Interactions”。该研究提出了一种基于单胞模型的聚电解质刷标度理论,系统揭示了单体间静电相互作用对聚电解质刷构型及溶胀行为的关键影响,为界面软物质结构调控提供了新的理论框架。2026.04.29

-
先机学院学术报告【7.30】:Learning physical AI models for mixed-autonomy traffic monitoring and control2026年7月30日(周四)9:30-10:30地 点:新奥工学大楼3004主讲人:Prof. Karl H. Johansson
-
先机学院学术报告【10.12】:从物理智能到具身智能2025年10月12日(周日)15:00-17:00地 点:北京大学新奥工学大楼1050会议室主讲人:马晓光 教授
-
北京大学“复杂系统与群体智能”博士生论坛2025年10月25日-26日地 点:新奥工学大楼3004报告厅主讲人:段慧玲、王启宁、宋洁、李忠奎
-
先机学院学术报告【9.9】:热辐射光子调控及应用2025年9月9日(周二)15:30-17:00地 点:新奥工学大楼4047主讲人:李炜 研究员
