

北京大学谢广明教授团队最新《Science Advances》研究成果:能“拼”会“变”的机器鱼群,正在拓展水下机器人的能力边界
近年来,海洋强国建设受到国家高度重视,水下机器人逐渐成为海洋环境感知、资源勘探与应急救援等领域中的关键核心装备。然而,现有传统水下机器人多针对特定应用场景设计,普遍存在运动模式单一、环境适应能力有限、任务灵活性不足等问题,在复杂、非结构化水域环境中表现出明显局限性。
相比之下,自然界中的鱼类展现出高度多样化且高效的运动方式:例如,鳗状游动具有良好的能效优势,而依靠胸鳍推进的鱼类则能够在狭窄复杂空间中实现灵活机动。这不禁引发思考:水下机器人能否“师法自然”融其所长,将鱼类多样化运动方式所蕴含的优势融合到同一机器人系统中,从而突破传统水下机器人的能力边界?
基于这一思路,北京大学谢广明教授团队在《Science Advances》发表论文,提出了一种模块化自重构机器鱼群系统。在该系统中,单个机器鱼如同一块智能“积木”,既能够独立完成游动任务,又可根据环境与任务需求与其他个体进行拼接,重构为不同构型,从而实现多样化运动模式,适应复杂非结构化水域环境并完成多类型任务挑战。
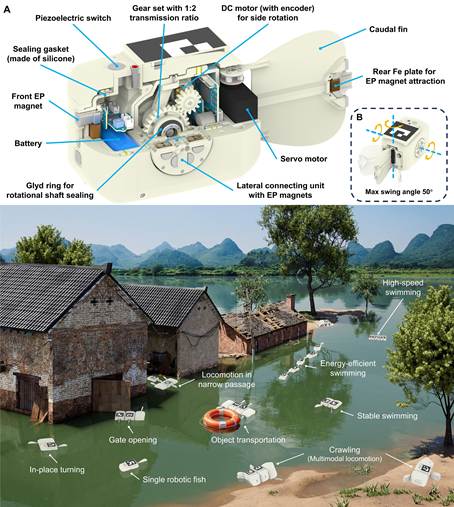
图1. 模块化机器鱼的设计原理及未来应用展望
在系统设计方面,每个模块化机器鱼单体均具备三个主动自由度,包括用于推进的尾鳍摆动关节及用于姿态调节的侧向旋转关节。该设计不仅支持单体自主游动,也使拼装后模块间能够快速调整相对朝向,为多构型协同运动提供基础。机器鱼之间通过电永磁铁连接机构实现纵向与侧向拼接,在保证连接稳定性的同时集成通信功能,支持重构结构下的协同控制与任务执行。
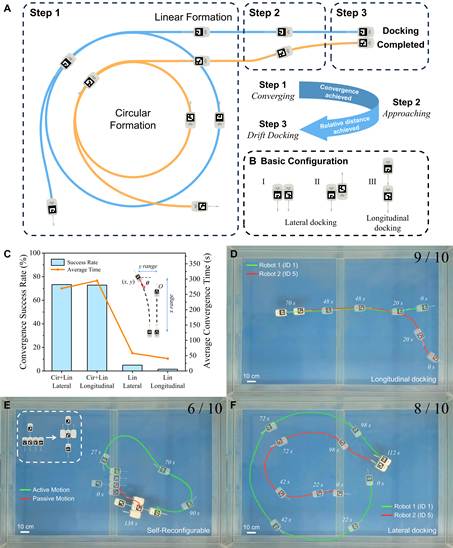
图2. 机器鱼群的自组装与自重构
水下对接过程中,机器鱼需应对水流扰动强、运动非完整约束等挑战,导致稳定精确对接难度较高。受鱼类编队游动行为启发,研究团队提出了一种基于编队的动态协作对接策略。该策略使机器鱼群能够根据初始分布与环境条件,自主选择编队形式,实现由远及近的协同收敛,在逼近过程中有效抑制流场扰动,最终完成稳定可靠的对接。
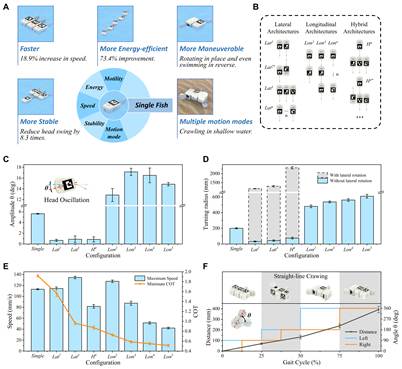
图3. 机器鱼在多样运动性能方面的突破
实验结果表明,通过模块化重构,机器鱼群在游动速度、运动稳定性、能量转换效率及机动性等方面均获得显著提升。在浅水环境中,系统还可通过构型调整实现类爬行运动,拓展了传统水下机器人难以覆盖的运动形式与活动范围。
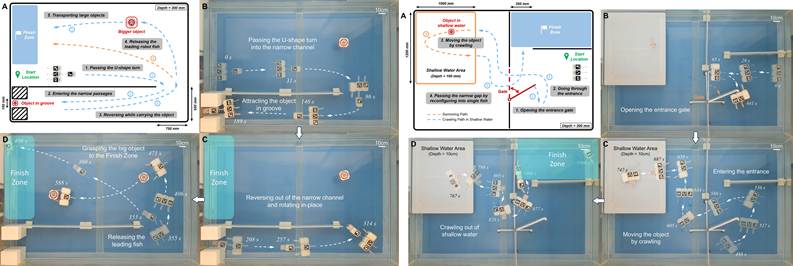
图4. 机器鱼群协作完成挑战性任务

图5. 野外环境实验
在任务验证方面,机器鱼群能够协同完成物体运输、开门、复杂地形爬行等任务,并可重构为抓手构型,实现对大尺寸目标的稳定抓取。进一步的野外水域实验表明,该系统在非理想环境下仍具备良好的可行性与鲁棒性。
总体而言,该研究在运动性能与功能实现能力方面显著拓展了水下模块化机器人的能力边界,突破了传统“特定功能依赖专用结构”的设计范式,为通过模块化与自重构实现高环境适应性和任务多样性的水下机器人提供了新技术路径。未来,该系统有望在水下救援、复杂水域探索等应用场景中发挥重要作用,为海洋强国战略实施提供有力技术支撑。
该论文的第一作者为北京大学先进制造与机器人学院博士研究生司博文,谢广明教授为唯一通讯作者。合作者包括北京大学工学院本科生常李垚、北京大学先进制造与机器人学院博雅博士后李帅、硕士研究生丁振宇。相关研究得到了国家自然科学基金、北京市自然科学基金等项目资助。
B.Si, L.Chang, S.Li, Z.Ding, G.Xie*, Self-reconfigurable robotic fish swarms: collective achievement of diverse locomotion and challenging aquatic tasks. Science Advances, 2026
论文链接:https://doi.org/10.1126/sciadv.adz2458