

北京大学先进制造与机器人学院国萌助理教授课题组在多机器人协同操作领域取得重要进展
近日,北京大学先进制造与机器人学院国萌助理教授课题组在多机器人接触式操作与任务-运动规划交叉方向取得新进展,提出多机器人协同推运系统 PushingBots,面向障碍密集、目标多样且可移动的复杂环境,实现多机器人对多件任意形状物体的在线协同推运与到位。相关成果以“PushingBots: Collaborative Pushing via Neural Accelerated Combinatorial Hybrid Optimization”为题,已被国际机器人领域顶刊《IEEE Transactions on Robotics (T-RO)》接收(DOI:10.1109/TRO.2025.3647767)。
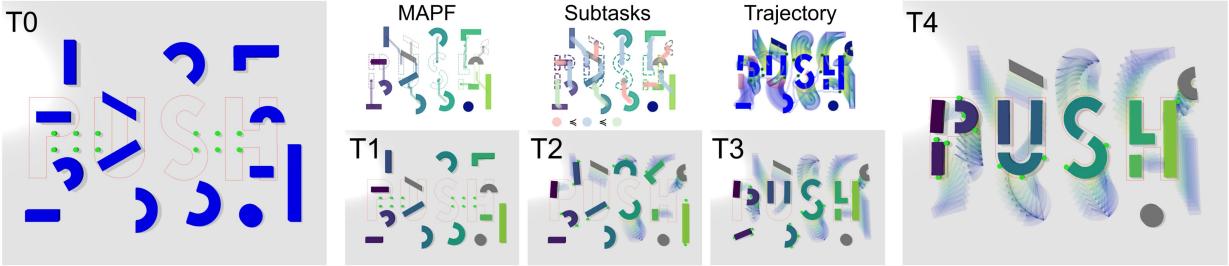

图1. 多机器人推动散乱物体构成“PUSH”图案(上)与两种场景下的实物实验结果(下)
在仓储物流、室内服务等应用中,许多移动机器人并不配备机械臂,且大量大尺寸或异形物体并不适合抓取。相比抓取,推运无需额外硬件,具备低成本与高适配性,但协同推运属于典型“接触丰富”任务:物体的平移与转动依赖接触点与推力组合,不同接触模式需要切换;同时,多机器人多物体并行执行还面临时空耦合、碰撞/死锁规避,以及在线执行中成本与时长不确定等困难。现有工作往往依赖预定义推运模式或固定形状假设,难以扩展到多机器人、多物体、复杂场景的通用设定。
针对上述挑战,课题组将整体问题建模为组合-混合优化(Combinatorial Hybrid Optimization, CHO):在高层需要动态决定“机器人子群与物体”的分配与协同次序,在底层需要为每个物体生成由推运模式与推力参数组成的混合执行序列。具体而言,方法首先基于多智能体路径规划(MAPF)对多物体推运任务进行分解,并构建带严格部分序关系的推运子任务;随后采用滚动时域协调策略,依据可行性与时长估计在线分配机器人子群;再通过关键帧引导的混合搜索,为每个子任务迭代生成可行且代价更优的推运模式序列,并配套在线混合控制与自适应机制以应对滑移、漂移等非理想因素。为进一步提升规划效率,团队引入扩散模型神经加速器,用于预测应优先探索的关键帧与推运模式,从而显著降低混合搜索开销;同时在温和假设下给出完备性与性能保证。
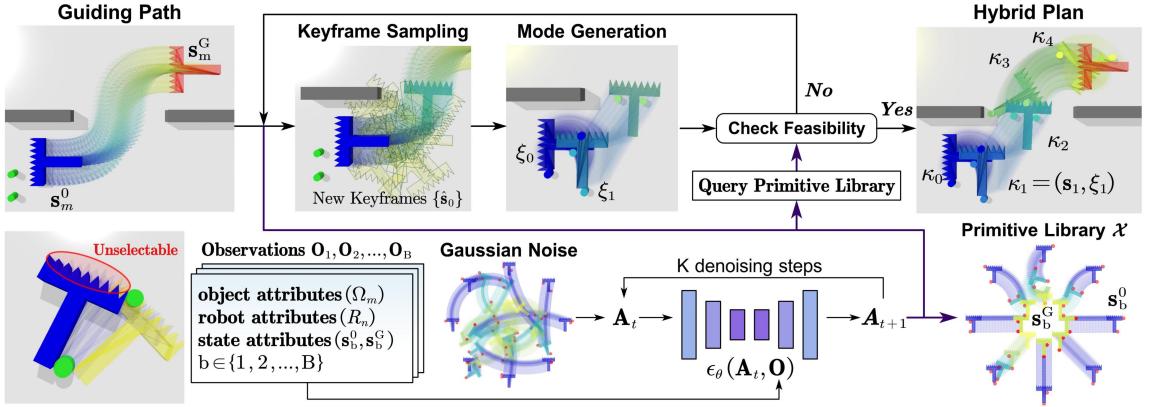
图2. 扩散生成模型加速的协同操作混合优化算法框架
为了验证方法的有效性,研究团队进行了大规模仿真与实物实验。仿真对比显示,在50组多物体协同推运任务中,所提出的神经加速组合-混合优化方法(NACHO)实现了100%任务成功率,在成功率、规划效率、执行成本方面均优于多种基线方法。在实物实验中,多台移动机器人完成了典型的交换与绕障重排等协同推运任务;即便存在一定滑移、漂移等扰动,系统仍可依托部分序约束与在线自适应机制稳定完成。进一步地,框架展现出良好的泛化能力:可扩展到异构机器人协作场景;可迁移至差速轮等非完整约束平台并支持四足机器人等不同机体形态;同时还能推广到三维空间的准静态近似失重设置下的6D位姿推运任务,体现出较强的通用性与工程应用潜力。
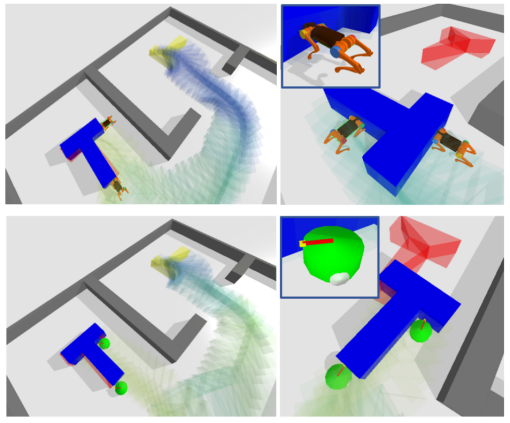

图3. 算法可泛化到四足机器狗、差速轮小车等异构平台(左)和3D失重场景(右)
该论文第一作者为北京大学先进制造与机器人学院博士研究生唐子力,北京大学先进制造与机器人学院国萌助理教授为唯一通讯作者,合作者为北京大学先进制造与机器人学院博士研究生张莹。